



În urmă cu o lună, în martie 2016, Boeing a prezentat Echo Voyager. Este al treilea membru al familiei ‘Echo’, după Echo Seeker și Echo Ranger – evident, cu caracteristici diferite. Nicăieri la Boeing nu scrie DARPA, dar lansarea mi-a dat o idee: să văd ce face DARPA pentru mări și oceane.
Acest articol are două părți care își propun să prezinte tehnologiile aflate în studiu peste ocean, aplicabile în produse care se vor găsi în viitor pe piață.
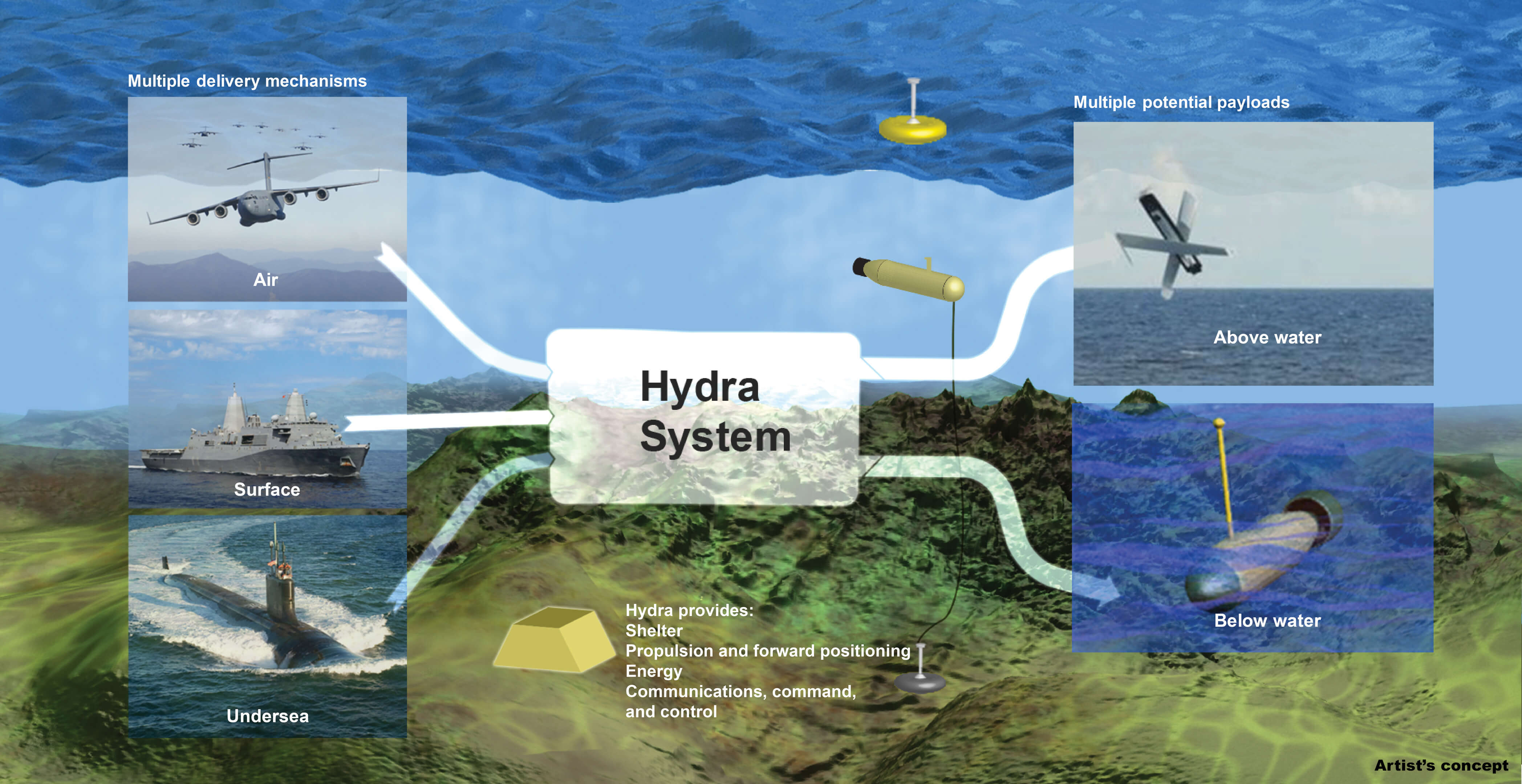
Hydra
Creatură mitologică în Grecia, dă numele unei inițiative lansată în august 2013. Evident, scopul declarat este de a oferi suport pentru viitoare operațiuni în zone în care apărarea este suficient de puternică sau cu piraterie în floare. Așa că Darpii s-au gândit la un sistem subacvatic capabil să lanseze cu costuri mici vehicule aeriene și subacvatice dintr-o zonă cât mai apropiată de teatrul de operațiuni. Hydra ar trebui sa folosească module standard cu diverse încărcături, aflate într-un container. Lansarea containerului (nava mamă) să se faca din aer, de pe suprafața apei sau subacvatic. În cadrul programului Hydra se va vace demonstrația acestor vehicule și a tehnologiilor folosite.
Hydra
Pe scurt, un vehicul autonom, fără echipaj, burdușit cu drone aeriene și subacvatice, capabil să se deplaseze unde e nevoie de el. Varianta lungă, pentru cei cu chef de citit și curiozitate, mai jos.
Programul are trei faze: în faza 1 definirea conceptelor și dezvoltarea componentelor, urmând ca în fazele următoare să se încheie dezvoltarea și să fie testate componentele într-un sistem stabil, funcțional, cu demonstrații practice.
Zonele de care este interesată DARPA sunt:
- Containerul pentru componentele Hydra, agnostic, putând fi folosit cu orice încărcătură, în funcție de misiune și care să ofere servicii pentru conținutul lui (ex: comunicații, energie). Trebuie sa stea timp lung în apropierea coastei. Componentele ar trebui să includă: cutia propriu-zisă, sistemul de comunicații, sursa de energie, sistemul pentru balast, sistemul de propulsie. Capabilitățile dorite: să își poată schimba poziția, să poată naviga autonom, să efectueze singur operațiunile de lansare a încărcăturii.
- UAV lansat dintr-un modul aflat în containerul standard. Hydra va oferi comunicații, energie, și stabilitatea necesară lansării. Modulul va conține, proteja, inițializa și lansa UAV-ul. Vehiculul va fi lansat din modul, se va ridica la suprafață, va zbura o distanță X și va efectua o misiune Y.
- UUV lansat dintr-un modul aflat în containerul standard. Însă aceste vehicule să poată reveni la containerul principal, să poată descărca informațiile adunate care să fie apoi transmise la ‘centru’. Bateriile UUV să fie reîncărcate de vehiculul mamă.
- Sistemele de comunicații, comandă și control și integrarea Hydra în infrastructura existentă.
- Surse de energie noi pe care sa le utilizeze sistemul, dată fiind durata mare a misiunilor.
Detaliile referitoare la capabilitățile și misiunile dronelor sunt secrete.
Se pare că măgăreața dezvoltării UUV din Hydra a căzut pe Boeing, care încearcă diverse soluții de integrare.
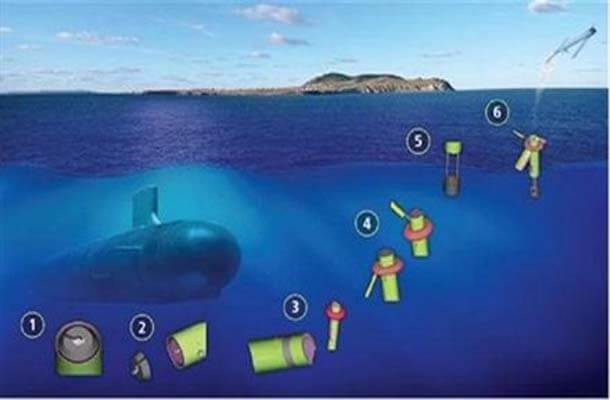
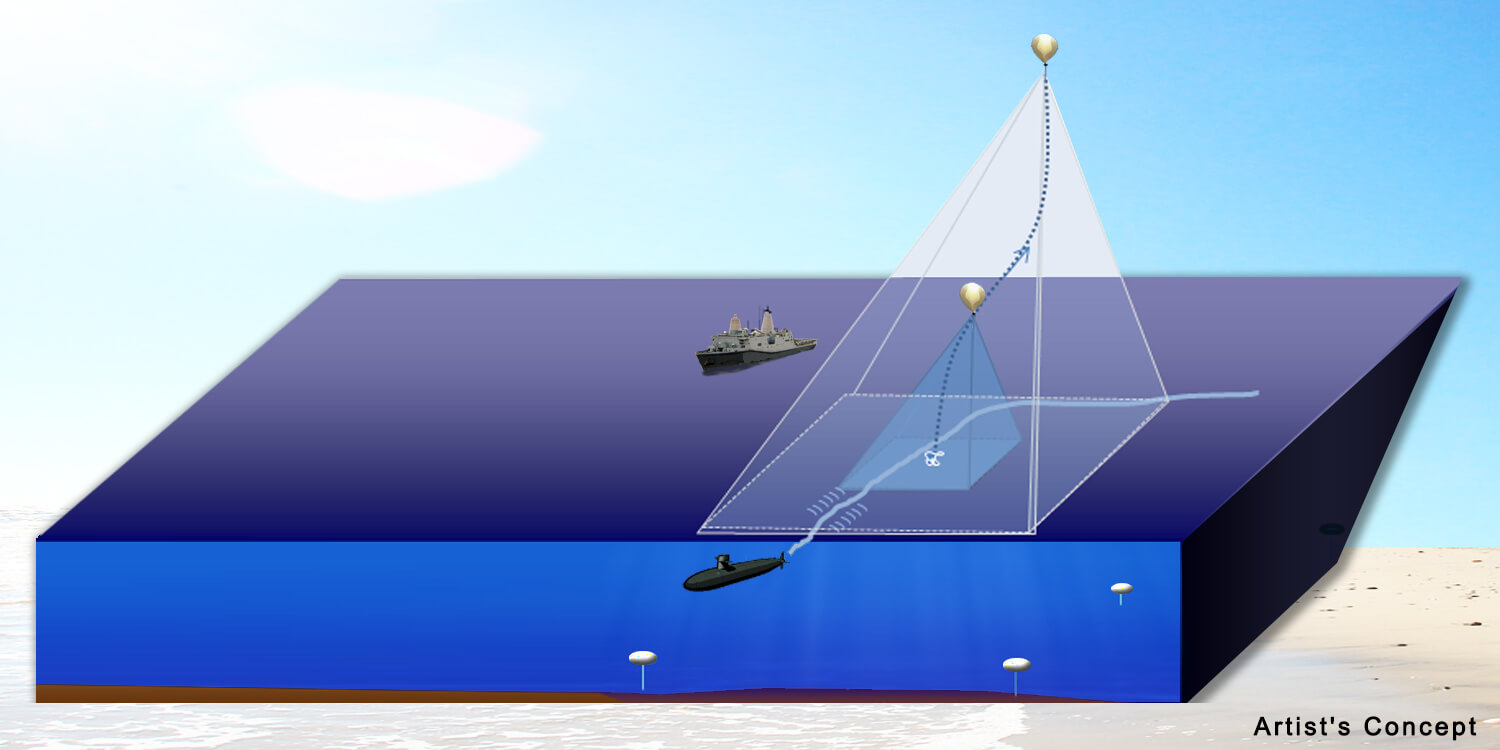
UFP (Upward Falling Payloads)
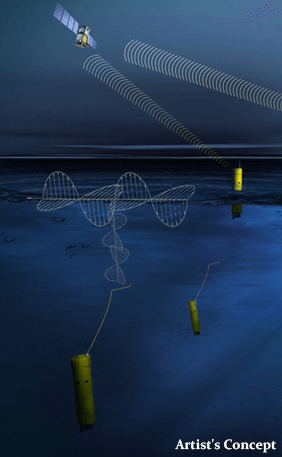
Am stabilit – cred – că DARPA crede că a avea ochi si urechi peste tot este o strategie bună. Beneficiarii tehnologiei (armata și marina) vor să le aibă la dispoziție când este nevoie, cu un cost cât mai mic; a le avea și a nu le putea folosi la momentul oportun duce întreaga situație pe terenul teoretic. Așa că odata cu Hydra, în ianuarie 2013, s-au apucat de UFP. Cred că totul a început cu o hartă a lumii și cineva care s-a gândit ‘Ui muică ce de Jie’, privind suprafața acoperită de apă. ‘Ce loc bun să ascundem ceva acolo.’ Adică un sistem distribuit, care să stea chiar și ani de zile pe fundul oceanului, în containere speciale. În momentul în care este novoie, nodul este activat de la distanță și se ridică la suprafață.

Sistemul are trei părți: încărcătura, containerul și sistemul de comunicații care declanșează ridicarea containerului.
Sistemul care va fi folosit pentru demonstrație trebuie să facă următoarele:
- Să reziste ani la presiuni mari (50% dintre oceane au o adâncime de peste 4000 de metri)
- Să primească corect comenzile de activare și să le execute
- Să se ridice rapid prin apă și să activeze încărcătura
Programul are trei faze:
- Faza 1 conține evaluarea proiectelor și studiile pentru a determina cele mai bune soluții pentru cele 3 puncte de mai sus.
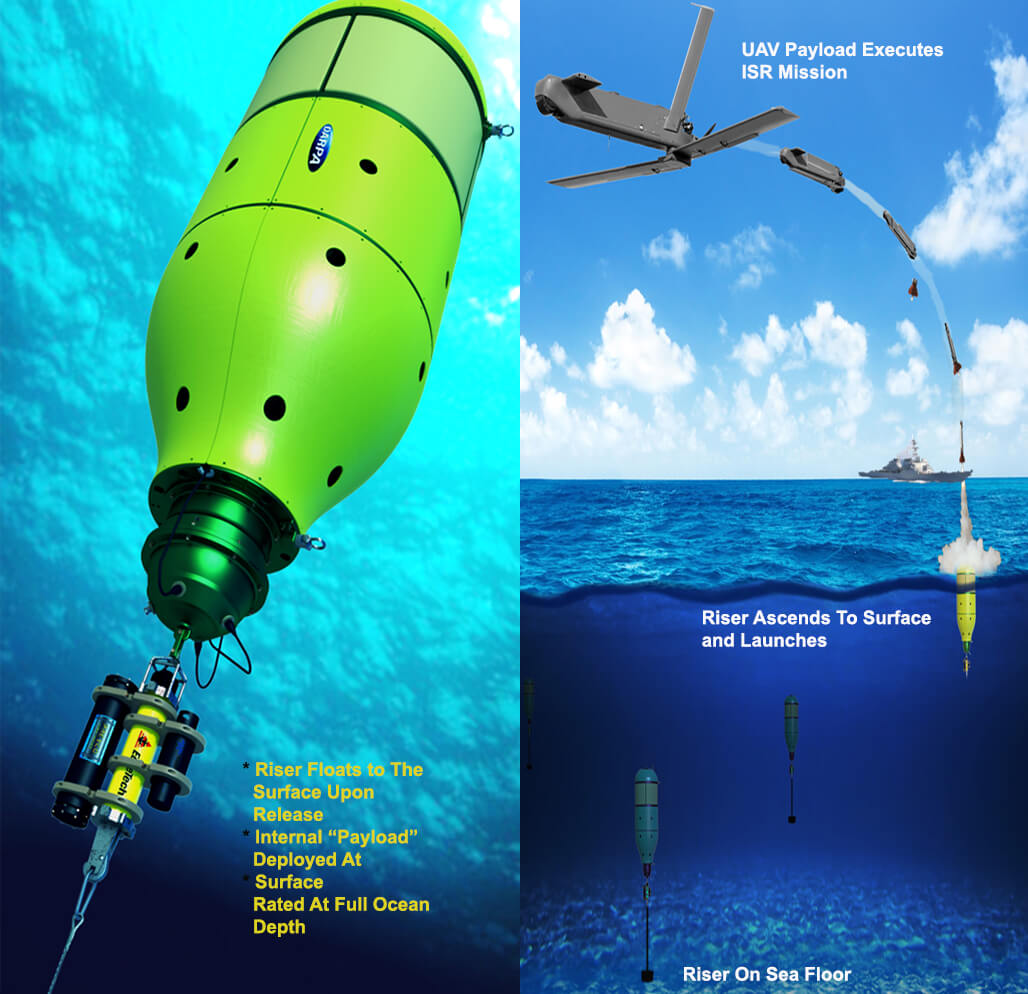
- Pentru faza 2 se dezvoltă și se testează componentele sistemelor de comunicații și ridicare, împreună cu două UAV și un zmeu. Da, zmeu.
- Faza 3 conține demonstrații reale ale sistemelor integrate, cu produsele și tehnologiile dezvoltate în primele două faze.
Posibilele utilizări sunt: observare tactică, rețele de comunicații, electronic warfare, misiuni de salvare. DARPA spune că nu vor fi fi platforme pentru arme.
Faza a doua începea în martie 2014 iar testele finale sunt planificate pentru primăvara lui 2017.
Blue Wolf
Orice vehicul autonom are nevoie de o sursă de energie. La suprafață este mai usor: lumina și oxigenul sunt la îndemână. Însă sub apă situația se complică, lumina fiind puțină, oxigenul la fel. Așa că chiar dacă sunt avantajate de mediu, UUV (Unmanned Underwater Vehicles) au dimensiunile și greutatea determinate de vehiculele (nave sau submarine) care le lansează și recuperează. Raza de acțiune este determinată direct de energia disponibilă pentru propulsie si puterea necesară menținerii unei viteze constante.
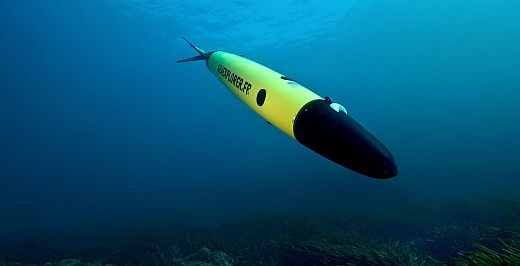
Blue Wolf își propune dezvoltarea unui UUV care să păstreze dimensiunile celor actuale, crescând viteza și raza acțiune considerabil. Tehnologiile care vor rezulta sunt cele de stocare și producere a energiei (termală, electrochimică, harvesting cu cel puțin două surse) și de reducere a frecării (prin materiale aplicate la suprafața UUV, diverse elemente hidrodinamice, forma corpului).
Testele finale urmează să fie realizate cu UUV existente deja în inventarul US Navy.
Programul a început în vara lui 2014, și la finalul lui 2015 s-au alăturat doi contractori obișnuiți pentru DARPA – Boeing și Lockheed Martin. UUV folosit pentru dezvoltare are un diametru de 21 de inci (533 mm – sună cunoscut?), propulsie electrică și control electric al suprafețelor de control.
POSYDON (Positioning System for Deep Ocean Navigation)
‘La riftul continental Est-African virați la dreapta’. Este ceea ce vor auzi șoferii submarinelor in viitorul nu foarte îndeprtat dacă planurile DARPA vor deveni realitate. Am reusit, am scris un titlu de știre de jurnalism românesc! Sublim.

Undele radio, la frecvența folosită de GPS, nu pot trece prin apă. Astfel, orice submarin sau UUV trebuie să iasă periodic la suprafață, chiar și numai pentru a afla poziția exactă, dacă nu să își sincronizeze ceasul. 🙂 Navigația este apoi preluată de sistemele inerțiale, însă în timp acestea au erori din ce în ce mai mari (drift), astfel încât o nouă ieșire la suprafață este necesară pentru a obține din nou poziția exactă.
Evident, ieșirile la suprafață le fac vulnerabile.
POSYDON este un program ce își propune sa dezvolte un sistem care să fie echivalentul GPS pentru navigarea subacvatică, un sistem mai bun, mai sigur și mai precis decât navigarea inerțială pentru UUV. Ar trebui sa ofere global informații de poziționare și navigare subacvatică, să aiba semnale de timp (asemenea GPS) și să fie robust.
Planul este de a instala pe fundul oceanului câteva surse acustice. Măsurând distanța până la acestea, o platformă submarină (UUV sau submarin clasic) poate ști continuu poziția exactă, fără a mai fi nevoie de GPS.
Evident, unul din scopuri este financiar: eliminarea unităților IMU și a senzorilor de viteză duce la scăderea prețului unui UUV.
Tehnologia ar trebui să ofere poziționare exactă în oceane, mări, de-a lungul coastei și chiar în porturi. Și totul cu imunitate la bruiaj și la tentativele de a opri folosirea sistemului.
Evident, fiind vorba de mediu acvatic soluția aleasă este cea acustică, insă dificultățile sunt date de recepția multiplă a semnalului cu diverse întârzieri datorită reflexiilor multiple, efectul Doppler datorat navelor aflate în mișcare și lățimea de bandă limitată a semnalelor transmise.
Lucrul a inceput în aprilie 2015, proiectul fiind planificat pe o durată de patru ani și are trei faze. Faza 1 se concentrează pe procesarea semnalelor și modelarea oceanului – 12 luni, faza 2 își propune dezvoltarea și demonstrarea practică a tehnologiei pentru a determina în mediu natural distanța – 18 luni. Faza 3 are ca scop demonstrația cu un sistem funcțional.
Iulian
Surse:
http://www.boeing.com/features/2016/03/bds-echo-voyager-03-16.pagehttps://www.fbo.gov/utils/view?id=f528af06320aac71486e160e073c1c3chttp://www.darpa.mil/program/hydrahttp://www.darpa.mil/news-events/2013-08-22ahttp://auvac.org/community-information/community-news/view/2847http://www.darpa.mil/program/upward-falling-payloadshttp://www.darpa.mil/news-events/2013-01-11http://www.darpa.mil/news-events/2014-03-26http://www.darpa.mil/program/blue-wolfhttp://www.militaryaerospace.com/articles/2014/07/darpa-blue-wolf.htmlhttp://www.militaryaerospace.com/articles/2015/08/undersea-vehicles-blue-wolf.htmlhttp://www.militaryaerospace.com/articles/2015/10/military-undersea-vehicles.htmlhttp://www.militaryaerospace.com/articles/2015/04/darpa-underwater-navigation.htmlhttp://www.darpa.mil/program/positioning-system-for-deep-ocean-navigationhttps://defensesystems.com/articles/2015/04/24/darpa-posydon-undersea-gps.aspxhttp://www.darpa.mil/program/tactically-exploited-reconnaissance-nodehttp://www.darpa.mil/news-events/2013-03-01http://www.darpa.mil/news-events/2015-12-28http://airandspace.si.edu/collections/artifact.cfm?object=nasm_A19730274000https://www.flightglobal.com/news/articles/darpa-advances-ship-based-male-uav-concept-404737/http://defense-update.com/20130304_darpa-considers-male-drones-to-support-future-naval-operations.htmlhttp://defense-update.com/20150324_tern-2.htmlhttp://defense-update.com/20130304_darpa-considers-male-drones-to-support-future-naval-operations.htmlhttp://www.unmannedsystemstechnology.com/2015/05/darpas-low-cost-tech-improve-uas-capabilities-sea/http://www.darpa.mil/news-events/2015-09-24
Foarte interesant articol. Multumesc.
Sincer taman sursele alea acustice artificiale vor fi calcaiul lui Ahile
Banui ca sunt destule surse acustice naturale, de exemplu cativa vulcani submarini, care emit zgomote inconfundabile la intervale regulate.
O sursa artificiala poate fi distrusa sau magarita in fel si chip, pe cand o sursa naturala mai greu… Poate un sistem dotat cu AI va face diferenta cand va fi vorba de pozitionare… Zic si eu nu dau cu parul….
De acord. Ca protectie primara cred ca se bazeaza pe:
– adincimea la care vor fi instalate
– faptul ca nu vor emite continuu, ci doar un puls la 4-8 ore
Asta face ca distrugerea lor sa fie posibila doar cu carpet torpedoing.
Sursele naturale sint o varianta buna, insa in timp sunetul lor se modifica. Daca au gasit un algoritm sa identifice exact sunetul pamintului, e utilizabil.
Plus inca ceva: vor fi folosite prin rotatie mai multe surse iar unele vor sta in conservare. Just in case.
Si totusi mizez pe AI si surse de zgomot naturale… Este imposibil ca pana in prezent sa nu fi facut o „cartografiere” ca sa zic asa a surselor de zgomot naturale de pe planeta…
Si aproape imposibil sa nu fi „interpretat” sub o forma sau alta a acestor sunete fie in gama audibila sau alta gama… Mai greu de bruiat aceste surse naturale, cele artificiale sunt dependente ca sa zic asa de factorul uman…
Dany, nu exclud varianta folosirii sunetelor naturale. In cazul vulcanilor submarini, incerc sa gasesc un element care sa le deosebeasca si modalitatea de a le categorisi pentru ca:
– un vulcan submarin nu are tot timpul acelasi zgomot ca in momentul masurarii
– apa are, totusi, efect de atenuare a sunetului. nu am gasit puterea cu care tipa un vulcan subacvatic pentru a estima distanta pina la care se poate auzi sunetul
– in conditii asemanatoare, doi vulcani vor avea acelasi sunet sau sunet asemanator
– ce te faci cu zonele in care nu ai vulcani?
@Iulian…
1ª-La cate expeditii submarine stiute sau nestiute, militare sau civile au fost, au avut timp suficient sa inregistreze orice sunet natural continuu sau intermitent, si chiar daca in momentul respectiv nu au avut hardul / softul sa interpreteze si sa catalogheze acele sunete, in acest moment mai mult ca sigur il au. Mai adauga si faptul ca orice expeditie submarina a avut si are de cele mai multe ori chiar sprijin din partea apararii diverselor state, chiar daca la prima vedere pare totul ok iar militarii nu par prezenti…
2ª-Cu ajutorul AI au realizat modele specifice fiecarui vulcan in parte… Doar 2006 si tsunamiul de rigoare ar putea fi un imbold destul de mare chiar daca nu ar fi componenta militara
3ª-Nu doar vulcanii emit zgomote mai mult sau mai putin perceptibile de urechea umana, ci si placile tectonice… in legatura cu acestea se cunosc destul de multe… deocamdata placile tectonice si zgomotul produs de ele este studiat intens … chiar daca se deplaseaza insesizabil pentru noi ele produc totusi sunete captate si catalogate … de obicei prin presa romaneasca / straina de scandal apar pe post de … fenomene paranormale…
4ª-Sub apa cam tot timpul se inregistreaza zgomot, mai puternic, mai slab, in gama de frecvente audibila sau nu…. unele sunt constante, altele sunt intermitente… colonii de animale subacvatice emit continuu sunete specifice… se cunosc destul de multe despre traseul pe care migreaza acestea… iarasi poate fi un punct de plecare pentru AI…
5ª-Cand AI va desena un tipar specific pentru fiecare in parte (fie vulcan, fie placa tectonica, fie grup / colonie de animale subacvatice) deja va fi rezolvata problema navigatiei submarine…
6ª-Chestia cu balizele submarine mi se pare o nada totusi aruncata pentru unii mai botanisti… Sau de ce nu un sistem trambitat si folosit pana in momentul unui conflict… Cand incepe conflictul se trece la altceva…
Dany, este posibil sa cad in pacatul supratehnologizarii unei solutii, cautind un control cit mai mare/bun asupra functionarii.
Complet de acord cu tine la punctele 1-5. Cheia in aceste situatii este muntele de date colectate si modelele matematice pentru dezvoltarea unora din algoritmi. Legat de AI, pattern recognition, machine learning si data crunching au ajuns destul de departe si este plauzibil.
Legat de punctul 6: stiindu-i pe yankei cu siguranta va avea mai multe surprize nepublice incluse, de care vom afla dupa o vreme. Un sistem activ-pasiv e o asemenea surpriza. Folosirea _si_ a VLF cu frequency hopping poate fi alta, desi e nevoie ca submarinele sa poarte dupa ele un mosor de cablu pe care sa il desfasoare pentru a primi semnalele.
Am oarece contact cu AI… de aia zic… am un proiect de sistem de operare dotat cu AI… deocamdata sunt in faza cautarilor… sistemul simplu asa cum il stim noi indiferent de platforma deja isi atinge limitele…
Pe alta parte AI este o foarte mare consumatoare de resurse… parca mai trebuie umblat cumva pe la partea de soft…
Hey, Tony Stark, lucrezi la JARVIS? 🙂
M-am jucat cu IC de la Cognimem si este chiar bun. Limitat in neuroni, dar mai multe ASIC pot face treaba bunicica in combinatie cu niste procesoare ARM. In software e nevoie de prea multe masini commodity pentru rezultate cit de cit decente.
http://www.cognimem.com/products/chips-and-modules/CM1K-Chip/index.html
Recent am „combinat” niscai telefoane mai vechi intre ele… 🙂 din alea cu 2 nuclee si 500Mb-1Gb ram, conectate la un server… practic sa pot folosi si puterea lor de calcul…
Mai am pana sa ajung la o putere de calcul cat de cat decenta… toate calculatoarele mele sunt ocupate cu proiecte, unele deja la lumina zilei… altele in faze mai mult sau mai putin avansate…Multa munca si timp putin… din pacate!
Hah! La asta nu m-am gindit cind am facut un cluster cu 8 RasPi zero. 🙂
Poate iti dau ceva pentru RasPi sa testezi… peste ceva timp… deocamdata suntem la inceputuri cu grupul, avem si cativa testeri. O sa cer adresa ta daca nu te superi @GMT-ului. Sa-i confirmi @GMT-ului exact aici, nu de alta dar iar ma pune pe mine sa te caut. Poate discutam in privat!
GMT, ii poti da adresa mea. 🙂
La mosor ma gandeam si eu… dar mi se pare un pic cam depasit in epoca actuala avand in vedere posibilitatile multiple de descoperire a unei tinte doar pe baza semnalelor electromagnetice emise…
Daca as fi inamicul USA, as face un sistem care sa emita exact aceleasi semnale dar din locuri diferite (sute de locuri diferite). Astfel toate calculele receptorilor de semnal sa fie date peste cap.
De ce sa ma complic eu sa le distrug americanilor emitatoarele?
Mai mult, le-as tine inactive pana incepe un razboi. Iar apoi le-as da drumul la toate in serii diferite aleatorii (din diferite locatii de fiecare data), incat si mama lui GPS submarin american sa isi dea demisia ca si marinarii de pe Donald Cook. 😀
Daca astia de la DARPA au mintea asa de odihnita, ma intreb inamicii americanilor ce jucarii vor sa produca si incat sa rupa gura targului? Nu de alta, dar presupun ca si tabara adversa are ceva centru de pus imaginatia in realitate.
„Daca as fi inamicul USA, as face un sistem care sa emita exact aceleasi semnale dar din locuri diferite (sute de locuri diferite). Astfel toate calculele receptorilor de semnal sa fie date peste cap.”
Da, ar, merge, dar numai în ipoteza cà americanii n-au auzit în viata lor de efectul Doppler-Fizeau, cà „este” prosti.
MirceaS: pentru noi, restul, este doar Doppler. 🙂 Insa la ce te referi cu el? Pentru ca in cazul unui jammer pentru Posydon efectul mentionat poate aparea in doua cazuri: sursa care emite semnalul este in miscare sau semnalul se reflecta de nave, submarine si alte obiecte in miscare.
Fizeau a extins effectul Doppler (prezentat ca fenomen optic, înainte de a se cunoaste natura luminii) la fenomenele electro-magnetice. Asa l-am învàtat în Franta 🙂 , unde cum nu mai este vorba strict de opticà, se adaugà Fizeau.
Iar receptorul fiind în miscare relativà, efectul se poate aplica în cazul acesta.
Those frenchmen. 🙂 Pai Christian Doppler l-a descoperit pentru spectrul audio, Fizeau pentru electromagnetic (lumina) dar la citiva ani dupa Doppler. E ca si cum as spune bozonul Higgs-Englert-Guralnik. Aia e, Higgs a iesit, Higgs sa ramina. 🙂
Ai dreptate cu receptorul, insa viteza lui poate fi determinata cvasi-exact pentru a procesa semnalul primit sau poate fi imobil.
Un sistem de genul acesta ar functiona astfel:
– fiecare emitator are o pozitie exacta, cunoscuta
– fiecare emitator are un ceas sincronizat cu toate ceasurile celorlalte emitatorare
– probabil pot primi semnale de sincronizare, activare si dezactivare pentru clock de la centrul de control, altfel ar exista clock drift de minim citeva secunde intr-un an
– la momentul oportun (la 8 ore, 12 ore, 24 de ore) toate emitatoarele (sau un grup) trimit un semnal care contine identificarea emitatorului si timpul. Pentru autentificare se foloseste sau un rolling code sau o semnatura (hash) digitale si trebuie sa existe si informatii de verificare (CRC) si, eventual, o schema de error correction.
Mediul acvatic permite doar transmiterea semnalelor acustice (infrasunete, spectrul audibil si ultrasunete). Dar frecventa mica duce la o latime de banda mica – nu cred ca vor transmite mai mult de 1kbps pentru o frecventa a purtatoarei de pina in 100 kHz (adica o latime de banda de 1 kHz). Evident, depinde si de schema de encoding sau modulatia aleasa.
Daca vrei sa trimiti semnale diferite pentru a induce in eroare sistemele care le receptioneaza, good luck, pentru ca toate informatiile de mai sus vor fi criptate si nu vei sti cheia de decriptare, chiar daca stii algoritmul.
Asa ca unui jammer ii ramine doar forta bruta – sa emita cu o putere cit mai mare, pentru a acoperi semnalul original, reflexiile si doppler shifts. Cu o schema de modulare desteapta se poate extrage semnalul dintr-un zgomot, daca acel zgomot are caracteristici constante, repetate.
Totusi, nu as vrea sa fiu peste…
…de ce asa de complicat? Foarte multe depind de ce stiu si inteleg unii despre oceanul planetar in sine ca asta-i campul de batalie. Ca hidraulica stiu toti!
Cand ies in patrulare in Pacific, boomerele VMF opresc reactoarele si navigheaza un timp folosind energia cinetica a curentilor marini . Kuro-Shivo e tangent chiar la Petropavlovsk-Kamceatsk care-i baza lor secundara! Trec astfel de reteaua de senzori acustici si ies in ocean. Pe urma apa marii are o densitate variabila cu temperatura si salinitatea. Prin urmare cu latitudinea. Sunetul se propaga diferit in medii cu densitati diferite, iar pana la adancimea de 30 de metrii oceanul functioneaza ca un ecran acustic. De aia sonarele plonjeaza sub adancimea asta. Problema e ca oceanul e atat de mare ca nu poate fi ascultat si controlat in totalitate dpdv tehnic. Odata ajuns acolo esti „pierdut” pentru ceilalti. Si poti lansa. Se pune doar problema blocarii desfasurarii, adica plecarii din baza. Dar cum ti-am spus mai sus unii sunt teribil de inventivi la asta. Operatiunea ATRINA a fost o lectie in privinta asta. USNAVY n-a stiut timp de 8 zile unde sunt si ce fac in Atlantic 5 VictorIII. Adica o intreaga divizie!
Luasem in calcul un model de semnalizare si comunicatii care sa ofere aceleasi functionalitati ca si GPS-ul (ceas si pozitionare).
Ceea ce vrei sa spui este ca e posibil sa nu dezvolte un asemenea sistem?
Si evident, poate fi si VLF. 🙂 Nu neaparat acustic.