



Definiția termenului radar, așa cum se găsește ea în dicționar, este:
- RÁDAR, radare, s. n. Sistem de radiolocație în care, cu ajutorul unui tub catodic și al unei aparaturi anexe, se determină direcția și distanța la care se află diverse obiecte îndepărtate (avioane, obstacole etc.). ◊ Radar auto = aparat portabil destinat măsurării vitezei autovehiculelor care trec prin câmpul electromagnetic emis. [Acc. și: radár] – Din engl., fr. radar, germ. Radar. [DEX 2009]
- RADÁR, radare, s. n. Aparat care emite unde electromagnetice și apoi le recepționează după ce au fost reflectate de un obiect; este folosit (mai ales în navigația aeriană și maritimă) pentru a detecta și localiza un obiect prin măsurarea timpului trecut între emisia și recepția undelor. ♦ Sistem de detectare și localizare folosit de aparatul descris mai sus. [DLRLC 1955-1957]
În primul rând se pot observa referințele la utilizarea energiei electromagnetice.
Un radar funcționează, deci, emițând energie electromagnetică și detectând energia care rezultă în urma interacțiunii dintre energia emisă și obiectele care o reflectă (să le numim ținte). Principiile fizice care stau la baza a ceea ce este cunoscut ca ecuația radarului sunt cunoscute din al doilea război mondial, informațiile fiind publicate în lucrări științifice după al doilea război mondial – în lumea liberă din 1947 cu lucrarea lui Norton și Omberg [1], apoi în cartea lui Ridenour [2].
\( R_{det} = \sqrt[4]\frac{ P_t G^2 \lambda^2 \sigma }{ (4\pi)^3 P_{min} } = \sqrt[4]\frac{ P_t G^2 c^2 \sigma }{ f^2 (4\pi)^3 P_{min} }\)
Termenii din aceasta ecuatie reprezinta:
- \(R_{det}\): distanța de detecție
- \(P_t\): puterea transmisă (watt)
- \(G\): câștigul antenei (parametru care descrie eficiența antenei)
- \(\lambda\): lungimea de undă
- \(c\): viteza luminii
- \(f\): frecvența
- \(\sigma\): RCS (engl Radar Cross Section)
- \(P_{min}\): puterea minimă detectabilă (semnalul minim detectabil)
Prima observație este cea că ecuația de mai sus reprezintă forma simplă a ecuației radarului. O variantă mai complexă a acesteia ia în calcul și diverși alți factori, însă vom folosi forma aceasta pe parcursul acestui articol. Această ecuație poate fi utilizată pentru a estima grosier distanța de detecție, însă – fiind o formă simplificată – rezultatele nu au foarte mare legătură cu realitatea. Pe lângă utilizarea sa pentru a estima distanța, este și un punct de pornire în etapa de proiectare a unui radar, putând fi văzută ca fiind un ghid al compromisurilor între diverși parametri care determină performanța unui radar. [4]
Este, totuși, nevoie de câteva clarificări.
– Câștigul antenei este: (1) direct proporțional cu suprafața sa (pentru antenele clasice) și (2) invers proporțional cu lungimea de undă (sau direct proporțional cu frecvența) pentru o suprafata data.
– Semnalul minim detectabil are de fapt legătură cu statistica, reprezentând o probabilitate de detecție, micșorând probabilitatea unei alarme false.
– RCS este suprafața efectivă de reflexie, aceasta caracterizând proprietățile reflective ale țintei.
– Fiind vorba despre un radical de ordin 4, creșterea razei de detecție a unui radar se obține cu eforturi foarte mari.
Vom interpreta ecuația de mai sus din cele două puncte de vedere prin care poate fi privită: al unui avion și al unui radar.
Avionul
Pentru ca un avion să fie detectat de la o distanță cât mai mică (să scadă Rdet), poate – pe baza ecuației de mai sus – să:
– aibă un RCS cât mai mic.
Evident, aceasta este metoda pasivă prin care poate fi scăzut RCS, cea ‘construită’ în avion. Metoda activă într-un acrticol viitor.
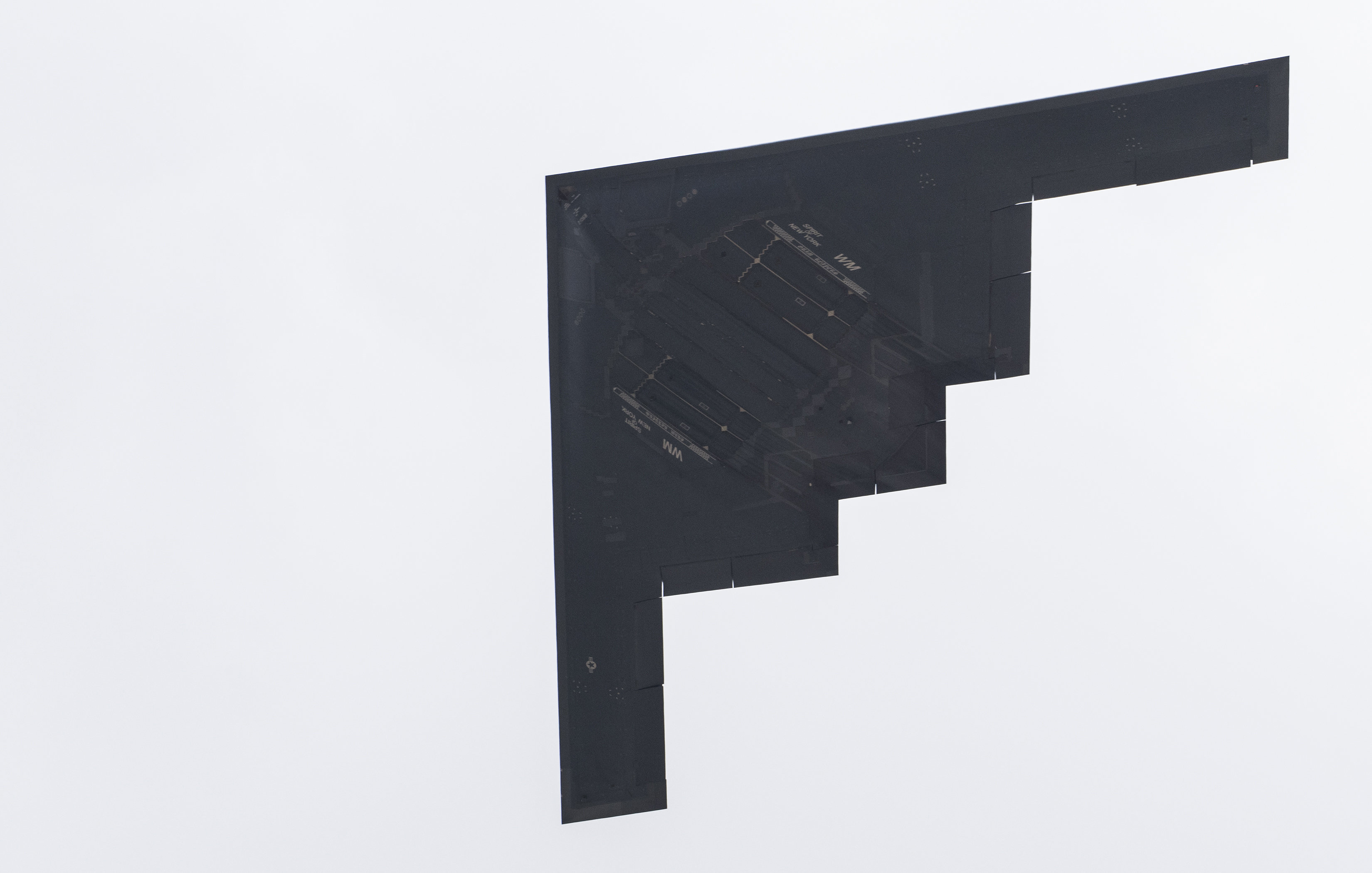
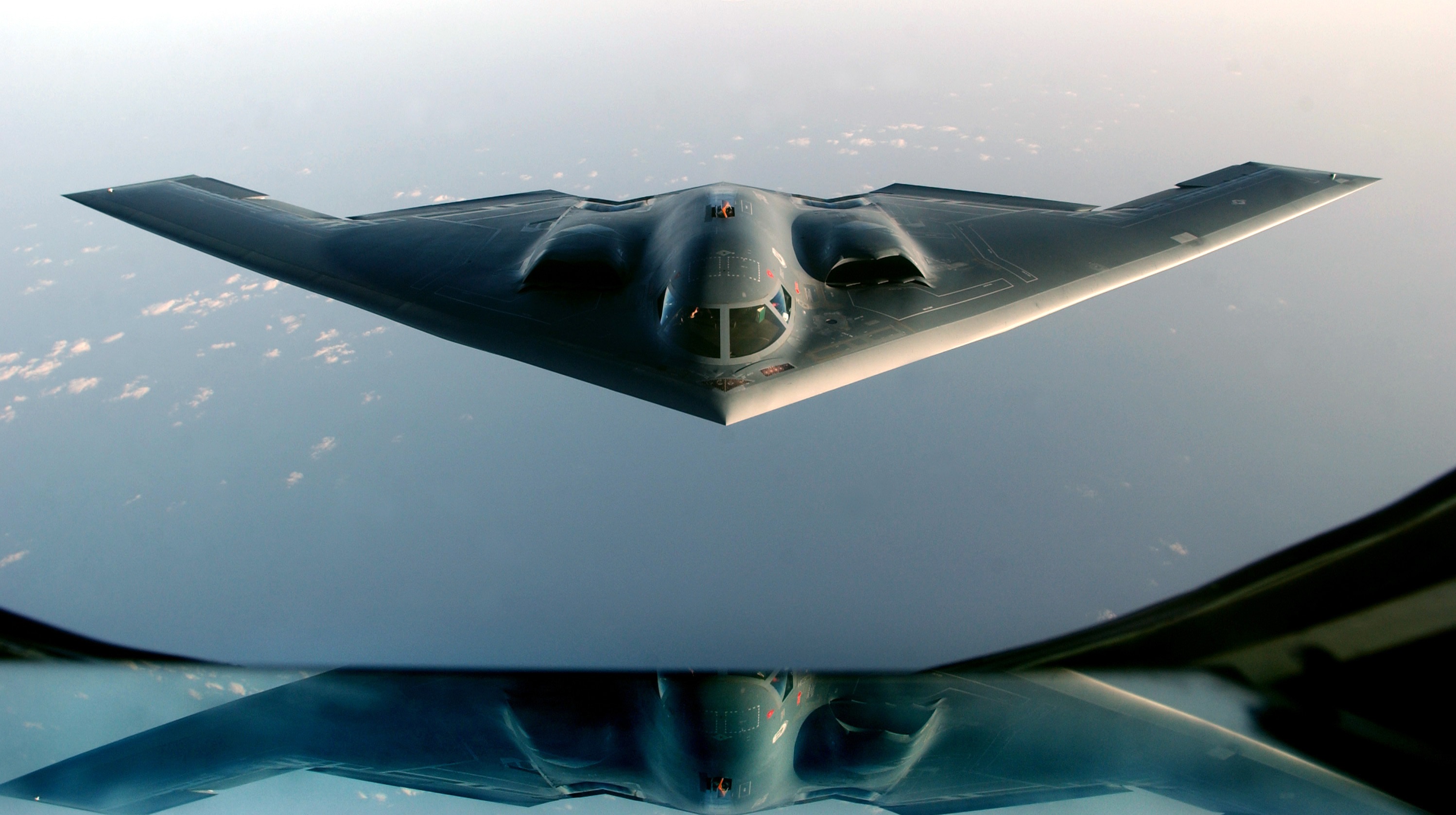
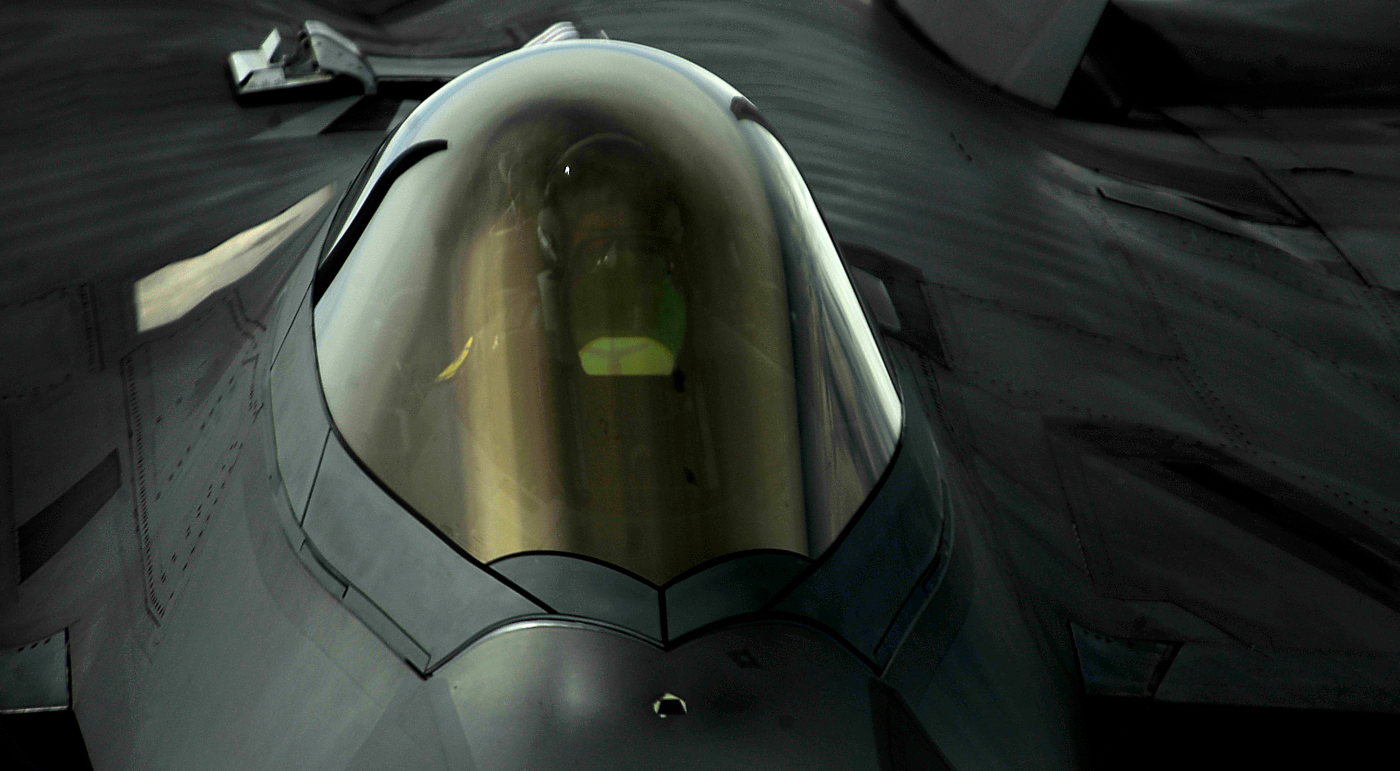
Toate țările și grupurile cu pretenții sau statut – USofA și OTAN, China, URSS Rusia – au și programe de dezvoltare a unor avioane care să poată fi încadrate în categoria invizibilelor – F-117, B-2, F-22, F-35/JSF, Su-57, J-20 și FC-31. Da, bineînțeles, nu putea lipsi ținta ironiilor – știm cu toții despre cine este vorba.
Radarul
Pentru ca un radar să poată detecta avioanele de la o distanță cât mai mare (să crească Rdet), poate – pe baza ecuației de mai sus – să:
– crească puterea cu care emite;
– crească lungimea de undă (scadă frecventa);
– folosească o antenă cu un câștig mai bun;
– detecteze semnale cu un nivel cât mai scăzut.
Odată cu apariția avioanelor care pun probleme de detecție și urmărire radarelor, au început și cercetările pentru a găsi modalități de contracarare a lor.
Situația din bazar
Avioanele pentru care proiectanții au făcut tot ceea ce au putut să obțină o reducere a RCS sunt mai jos.


























































































































Inițial în Uniunea Sovietică/Rusia cuceririle științei și industriei sovietice au determinat folosirea acelorași tipuri de radare utilizate și de adversarul politico-economico-militar conform tendinței momentului, situația însă modificându-se după prezentarea publică a F-117 și B-2, apoi după intrarea în serviciu a F-22. Iar dacă ne gândim la F-35, zgomotul pe această temă este la un nivel înfiorător. URSS și mai apoi Rusia au dezvoltat capabilități antiaeriene și antibalistice avansate. Rachete antiaeriene și antibalistice, mai exact.
S-300P (SA-10 Grumble) este versiunea inițială a S-300, care a intrat în serviciu în 1978, urmând apoi S-300PT (SA-10A Grumble?). A urmat S-300PS (SA-10B Grumble) – varianta autopropulsată – în 1982 care avea o mobilitate mai mare prin utilizarea unui nou vehicul/șasiu (un vehicul 8×8 MAZ-7910, fața de varianta cu cap tractor la ce anterioară; alte surse vorbesc despre utilizarea acestui șasiu începând cu un model următor). A urmat apoi o linie de modernizare S-300PT-1 și S-300PT-1A (SA-10B/C Grumble ?), însă linia principală de dezvoltare a continuat în 1985 cu S-300PM (SA-10D/E Grumble ?) și în 1992 S-300PMU (SA-10F Grumble). Dezvoltaea ulterioară a sistemelor a fost S-300PM-1/S-300PMU-1 (SA-20 Gargoyle) în 1993 și continuarea sa, un upgrade, S-300PM-2/S-300PMU-2 Favorit (SA-20B) în 1997. Evoluția sistemelor antiaeriene sovietice ruse a continuat cu S-400 Triumf (SA-21 Growler) – inițial denumit S-300PMU-3 și fiind un upgrade al S-300PMU-2, dezvoltat de compania Almaz-Antey; intrarea sa în serviciu a fost aprobată în 2007. A fost anunțat și S-500, acesta cu siguranță fiind conceput pentru a lupta împotriva avioanelor de generația a șasea.
S-300V (SA-12 Gladiator/Giant), introdus în 1984, este o variație a platformei S-300 care are doar numele împrumutat de la aceasta, fiind conceput și construit de Antey și nu Almaz. Versiunea sa următoare – un upgrade se pare – este S-300VM (SA-23 , exportat ca Antey-2500), introdus în 1996. Următoarea versiune a sa, care se pare că poate fi utilizată și împotriva AWACS, este S-300V4, cunosct și ca S-300VMD și exportat ca Antey-4000.
Din punct de vedere al radarelor, sistemele antiaeriene au utilizat:
– S-300P, S-300PT: 5N63 Flap Lid A; ST-68U Tin Shield, 5N66 Clam Shell
– S-300PS: 5N63S Flap Lid B; ST-68U Tin Shield, 5N66 Clam Shell
– S-300PMU: 30N6E Flap Lid C; ST-68U Tin Shield, 5N66 Clam Shell
– S-300PMU-1: 30N6E/E1 Tomb Stone; ST-68U Tin Shield, 76N6 Clam Shell, 64N6E Big Bird, 96L6E, 1L119 Nebo SVU, 67N6 Gamma DE, 59N6 Protivnik GE
– S-300PMU-2: 30N6E2 Tomb Stone; ST-68U Tin Shield, 76N6 Clam Shell, 64N6E Big Bird, 96L6E, 1L119 Nebo SVU, 67N6 Gamma DE, 59N6 Protivnik GE
– S-400: 92N6E Grave Stone; 96L6E, 91N6E Big Bird, 55Zh6 Nebo UE Tall Rack, 1L119 Nebo SVU, 67N6 Gamma DE, 59N6 Protivnik GE
Radarul 5N63 Flap Lid a avut câteva variante de-a lungul timpului: 5N63 (S-300PT), 5N63S (S-300PS), 30N6 (S-300P), 30N6E (S-300PMU), 30N6E1 (S-300PMU-1), , 30N6E1 (S-300PMU-2). Este radarul utilizat pentru urmărirea țintelor și ghidarea rachetelor. Informațiile despre aceste radare spun că puteau fi angajate până la 12 ținte cu radarul 5N63 (S-300PT) sau 5N63S (S-300PS), însă alte surse vorbesc despre capabilitatea radarului 5N63S de a angaja 6 ținte, cu câte două rachete pentru fiecare țintă. 30N6 putea angaja doar 4 ținte și funcționează, în funcție de model, în benzile I, H și/sau J.







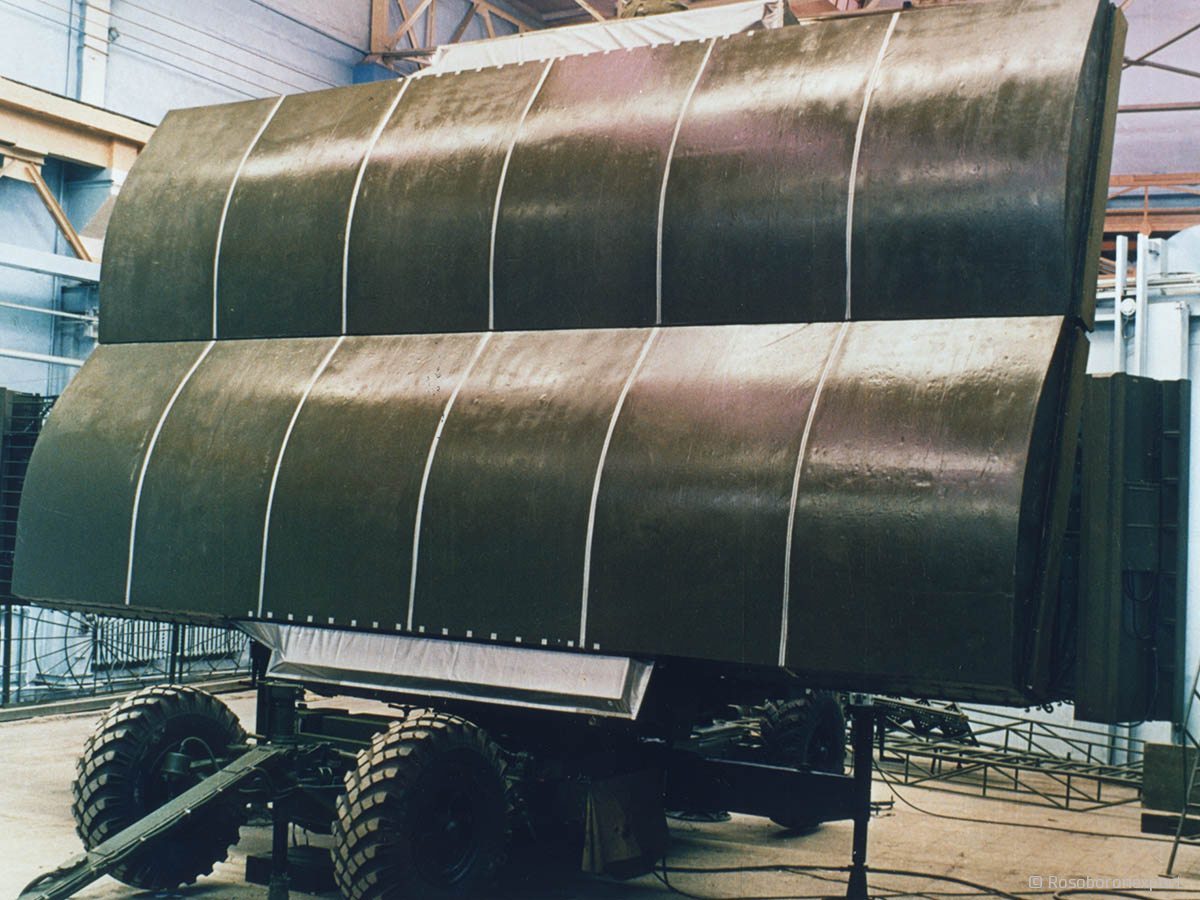
Radarul ST-68U Tin Shield cu variante multiple (5N59, ST-68, 19Zh6, ST-68U, 35D6, 36D6, ST-68UM) a fost folosit pentru S-300P, S-300PS, S-300PMU, S-300PMU-1, S-300PMU-2. Poate fi amplasat și pe un catarg universal (40V6MD sau 40V6M). Este un radar utilizat pentru supraveghere și descoperirea şi determinarea ţintelor (engl target acquisition) la altitudine medie și înaltă, în banda S.



Radarul 5N66 Clam Shell a avut și el mai multe variante (5N66, 5N66M, 76N6, 76N6E, 40V6M, 40V6MD), fiind folosit în sistemele S-300P, S-300PS, S-300PMU, S-300PMU-1, S-300PMU-2 pentru descoperirea şi determinarea ţintelor care zboară la altitudine joasă. E amplasat pe un catarg (40V6MD sau 40V6M) și folosește banda I, alte surse vorbind despre banda S.







Începând cu S-300PMU-1 au fost adăugate sistemelor de rachete antiaeriene o serie de alte componente.
Radarul 64N6E Big Bird are – evident – mai multe variante (5N64S, 64N6E, 64N6E1, 64N6E2, 91N6E) și a fost utilizat pentru S-300PMU-1, S-300PMU-2, S-400. Foloseșe banda C și este cheia capabilităților antibalistice pe care le au aceste sisteme. Poate fi comparat din punct de vedere al capabilităților cu radarul SPY-1 Aegis.



Radarul NNIIRT 1L119 Nebo SVU este un radar AESA, prezentat în 2001, care folosește banda VHF. Conform unor surse de pe interneț, scopul său este atât supravegherea spațiului aerian cât și urmărirea cu precizie a țintelor, transmițând aceste informații către CMS, responsabil cu ghidarea rachetelor. Are și o evoluție – componenta RLM-M a radarului Nebo M. O țintă cu RCS de 2.5 metri care zboară la altitudinea de 500 m este descoperită de la 60 km, la altitudinea de 10000 m de la 270 km, la altitudinea de 20000 m de la 360 km.





Radarul 67N6 Gamma-DE este un radar AESA destinat supravegherii 3D a spațiului, existând câteva modele, cu performanțe diferite în funcție de putere și dimensiune (D1/D1E, D2/D2E, and D3/D3E) și utilizează banda UHF. Producătorul îl laudă cu detecția unui obiect cu RCS de 1 metru pătrat la 400 km și 0.1 metri pătrați la 240 km.


Radarul 59N6 Protivnik-GE este un radar de supraveghere 3D a spațiului în banda L, o variantă a sa fiind integrată în sistemul Nebo M. Poate descoperi conform producătorului o țintă cu RCS de 1.5 metri pătrați la altitudinea de 100 m de la 40 km, la altitudinea de 1000 m de la 100 km, la altitudinea de 5000 m de la 240 km, la altitudinea de +12000 m de la 480 km.




S-400 este un sistem nou din punct de vedere al capabilităților pe care le oferă, având câteva radare noi.
Radarul 92N6E Grave Stone cunoscut și ca 92N2E este radarul utilizat pentru a angaja țintele. Nu există informații publice referitor la acest radar.


Radarul 96L6E este utilizat pentru descoperirea şi determinarea ţintelor și este parte a sistemelor S-400, însă poate fi integrat, și în sistemele S-300. A fost dezvoltat pentru a înlocui radarele în banda S 36D6 Tin Shield și 5N66 Clam Shell, în funcție de sursă vorbindu-se că ar folosi banda S sau banda L. Are o distanță de detecție a țintelor de 5-300 km.


Radarul 55Zh6-1 Nebo-UE Tall Rack (55ж6-1 Небо-УЕ) este un radar de supraveghere care foloseșe banda VHF. Poate detecta o țintă cu RCS de 2.5 metri pătrați (un avion) care zboară la o altitudine de 500 m de la minim 65 km, la o altitudine de 10 km de la minim 300 km și la o altitudine de 27 km de la minim 400 km. O rachetă de croazieră cu un RCS de 0.9 metri pătrați poate fi detectată de la 250 km dacă zboară la altitudinea de 10 km și la 300 km dacă zboară la altitudinea de 20 km.


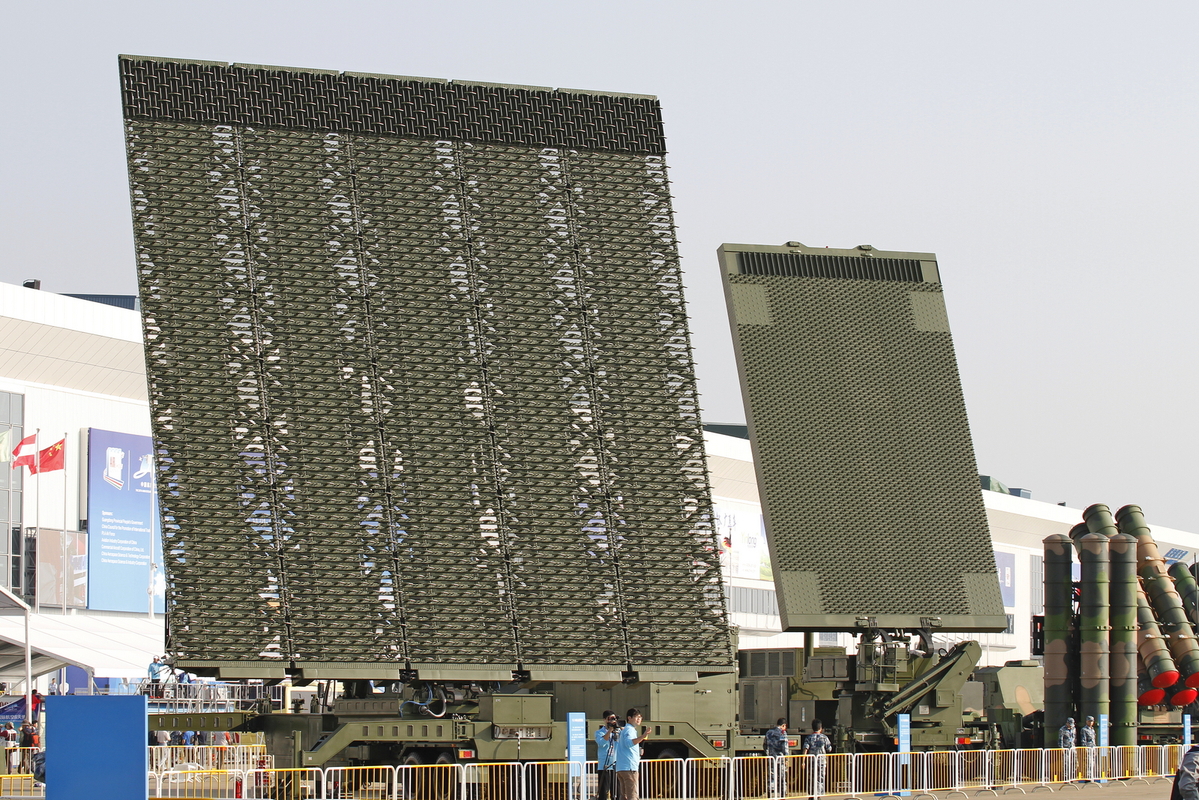
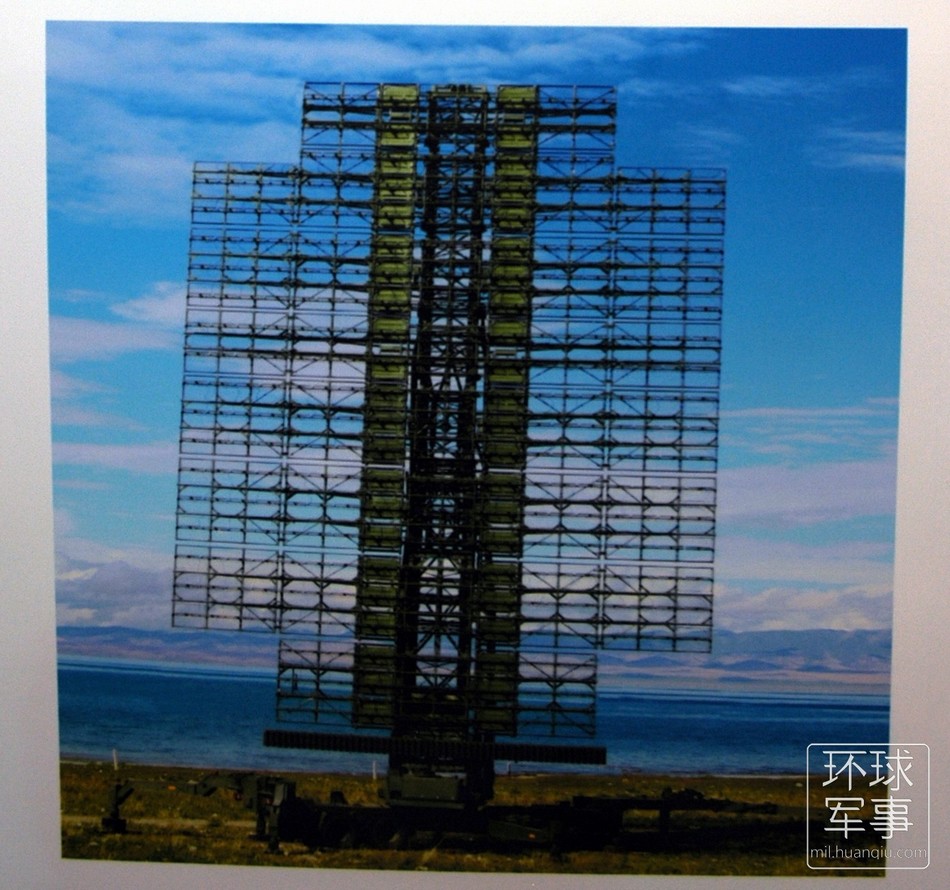
China utilizează și ea derivate ale S-300, acestea fiind cunoscute ca HQ-10 (S-300PMU-1), HQ-15 (S-300PMU-2), HQ-18 (S-300V). Pe lângă acestea, a furat dezvoltat și alte câteva radare care ar trebui să fie răspunsul la dezvoltarea de avioane de generație a cincea – YLC-8B, JY-26, JY-27.





Câteva idei
Dezvoltarea tehnologiilor în direcția care asigură ‘invizibilitate’ avioanelor are loc în principal în emisfera vestică (USofA și Europa). URSS Rusia și China au jucat acest joc doar în sensul contracarării amenințării invizibilității. Doar de curând China a intrat în grupul țărilor celor care dețin tehnologie care poate asigura ‘invizibilitatea’ avioanelor, furând copiind dezvoltând această tehnologie cu eforturi considerabile.
Evident, odată cu intrarea în serviciu a Su-57 (aceasta era doar o ironie), J-20 și FC-31 se pune întrebarea cu ce pot contracara USofA amenințarea invizibilă. Oricât ar putea părea de surprinzător, USofA au deja un sistem care se pare că poate face aceasta – Northrop Grumman E-2D Advanced Hawkeye, care dispune de un radar în banda UHF.





Însă cum discuțiile se poartă în general pe tema aviație vestică față în față cu sisteme antiaeriene sovietice ruse, vom privi lucrurile de așa natură în continuare.
Cunoaștem – pe baza informațiilor publice – caracteristicile radarelor sovietice ruse, prezentate pe scurt mai sus.
| Radar | An Baterie |
Funcție | Capabilități | Tip | Bandă | Putere |
|---|---|---|---|---|---|---|
| 5N63 Flap Lid | 1980 S-300P S-300PT S-300PS S-300PMU |
urmărire ținte ghidare rachete |
Distanță: 0.2-155 km Altitudine: 0-30 km |
Pulse Doppler (?) Continuous Wave Illumination (?) |
NATO: H/I IEEE: C/X (și/sau J|X/Ku după alte surse) |
– |
| 30N6 Tomb Stone | 1990 S-300PMU-1 S-300PMU-2 |
urmărire ținte ghidare rachete |
Rază: 300 km (Distanță: 0.2-167 km, Altitudine: 0-167 km) |
Pulse Doppler (?) Continuous Wave Illumination (?) |
NATO: I/J IEEE: X/Ku (H|C după alte surse) |
– |
| ST-68U Tin Shield | S-300P S-300PS S-300PMU S-300PMU-1 S-300PMU-2 |
supraveghere descoperire şi determinare ţinte (altitudine medie, înaltă) |
Rază: 75 sau 150 km | – | NATO: E IEEE: S |
maxim 2.5 MW |
| 5N66 Clam Shell | S-300P S-300PS S-300PMU S-300PMU-1 S-300PMU-2 |
supraveghere descoperire şi determinare ţinte (altitudine joasă) |
Distanță: 90 km @ 500 metri Distanță: 120 km @ 1000 metri |
FMCW (Frequency Modulated Continuous Wave) | NATO: I IEEE: X (E-H|S-C după alte surse) |
minimum 1.4 kW (RF)/max 55 kW (consum) |
| 64N6E Big Bird | S-300PMU-1 S-300PMU-2 S-400 |
descoperire şi determinare ţinte | Rază: 259-278 km pentru primele versiuni | – | NATO: E/F (64N6E2 ?) IEEE: S (64N6E2 ?) (G/H|C după alte surse) |
– |
| NNIIRT 1L119 Nebo SVU | 2005 S-400 |
supraveghere și urmărire ținte | Altitudine: 500 m, 60 km Altitudine: 10000 m, 270 km Altitudine: 20000 m, 360 km |
– | IEEE: VHF | 1.4-2 kW/modul (120-160 kW) |
| 67N6 Gamma-D | 2007 S-400 |
supraveghere | Distanță: 10-400 km Altitudine: 0-30.5 km |
– | IEEE: UHF | – |
| 59N6 Protivnik-G | 1999 S-400 |
supraveghere | Distanță: 0.4-398 km Altitudine: 0-100 km Altitudine: 100 m, 40 km Altitudine: 1000 m, 100 km Altitudine: 5000 m, 240 km Altitudine: +12000 m, 480 km |
Pulse | NATO: D IEEE: L |
– |
| 92N6E Grave Stone | S-400 | angajare a țintelor | – | – | NATO: I/J IEEE: X/Ku |
– |
| 96L6E Cheese Board | S-400 | descoperire şi determinare ţinte | Rază detecție: 5-300 km | – | NATO: G/H IEEE: C (D-F|S/L după alte surse) |
– |
| 55Zh6-1 Nebo-UE Tall Rack | 2007 (probabil) S-400 |
supraveghere | Altitudine: 500 m, minim 65 km Altitudine: 10 km, minim 300 km Altitudine: 27 km, minim 400 km |
– | IEEE: VHF | 5 kW mediu, 500 kW maxim |
Notă: informațiile disponibile public sunt contradictorii de multe ori; doar o analiză detaliată a fiecărui model alături de obținerea de informații prin metode specifice pot duce la o imagine completă și corectă.
De asemenea, tot din informații publice cunoaștem caracteristicile diverselor avioane, însă ceea ce ne interesează în această discuție este RCS. Evident, RCS este diferit în funcție de direcția din care este ‘observat’ un avion, așa cum se poate vedea mai jos, în simularea realizată pentru cazul unui F-35/JSF.
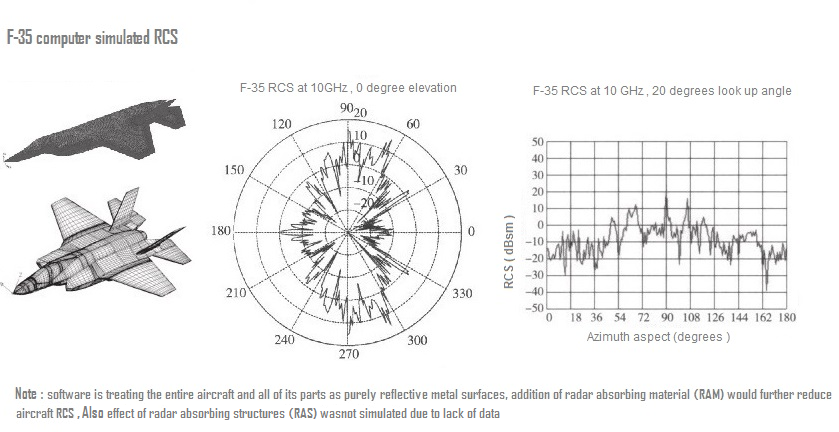
Simulare F-35
Fără informații suplimentare (frecvența la care a fost determinat RCS, direcția radiației incidente), putem doar pleca de la anumite ipoteze (de exemplu că RCS este pentru banda X/I (IEEE/NATO) și pentru cazul în care avionul se îndreaptă direct spre radar). De asemenea, și în cazul simulării de mai sus s-a plecat de la presupuneri, simulare care este diferită de realitate din punct de vedere al modului în care este reflectată radiația și al radiației reflectate (simularea a fost realizată pentru un corp din metal).
| Avion | An Zbor/Serviciu |
Țară | RCS (m^2) |
|---|---|---|---|
| Boeing B-52 Stratofortress | 1952/1955 | USofA | 100-125 |
| McDonnell Douglas F-15 Eagle | 1972/1976 | USofA | 25 (?) |
| Tupolev Tu-160 Blackjack | 1981/1987 | URSS | 15 |
| Sukhoi Su-27 Flanker | 1977/1985 | URSS | 15 |
| General Dynamics F-111 Aardvark | 1964/1967 | USofA | 7 |
| McDonnell Douglas F-4 Phantom | 1958/1960 | USofA | 6 |
| General Dynamics F-16 Fighting Falcon | 1974/1978 | USofA | 5 |
| Mikoyan-Gurevich MiG-21 Fishbed | 1956/1959 | URSS | 4 |
| Sukhoi Su-30 MKI (Flanker-H) | în dezvoltare | URSS | 4 |
| Mikoyan MiG-29 Fulcrum | 1977/1982 | URSS | 3 |
| Dassault Rafale-D | 1992(?)/2001(?) | Franța | 2 |
| General Dynamics F-16C Fighting Falcon | 1984 | USofA | 1.2 |
| McDonnell Douglas F/A-18 Hornet | 1978/1983 | USofA | 1 |
| Rockwell B-1 Lancer | 1974/1986 | USofA | 0.75-1/10 |
| Eurofighter Typhoon | 1994/2003 | Evropa | 0.5 |
| General Dynamics Tomahawk SLCM | 1983 | USofA | 0.5 |
| Northrop Grumman B-2 Spirit | 1989/1997 | USofA | 0.75/0.1 |
| Lockheed F-117 Nighthawk | 1981/1983 | USofA | 0.025 |
| Lockheed Martin F-22 Raptor | 1997/2005 | USofA | 0.0001 |
| Lockheed Martin F-35 Lightning II (JSF) | 2006/2015 | USofA | 0.005 |
| Cessna 182 Skylane | 1956 | USofA | 10 |
| Rachetă de croazieră | 0.1-10 | ||
| Păsări (*) | 0.01 | ||
| Insecte (*) | 0.001 |
Notă: informațiile disponibile public sunt contradictorii de multe ori; doar o analiză detaliată a fiecărui model alături de obținerea de informații prin metode specifice pot duce la o imagine completă și corectă.
Notă (*): în banda X/I (IEEE/NATO)
Putem, așadar, să facem câteva estimări pe baza informațiilor publice despre sistemele radar și avioane folosind ecuația radarului prezentată la începutul acestui articol. Considerând o țintă cu un RCS de 10 de metri pătrați care este detectată de la distanța de 150 de km, atunci folosind ecuația de mai sus rezultă următoarele distanțe de detecție în funcție de RCS:
– 1000 m2 RCS: 500 km
– 100 m2 RCS: 275 km
– 75 m2 RCS: 250 km
– 10 m2 RCS: 150 km
– 5 m2 RCS: 125 km
– 1 m2 RCS: 90 km
Cei 1000 de metri pătrați RCS pot fi ai unui B-52 zburând la altitudine mare. Graficele următoare prezintă o estimare a posibilităților de detecție și urmărire a țintelor în funcție de modelul de radar, bandă, RCS și distanța până la țintă. În ordinea imaginilor, benzile sunt VHF (A), UHF (B-C), L (D), S (E-F) și X (I-J) – IEEE (NATO).
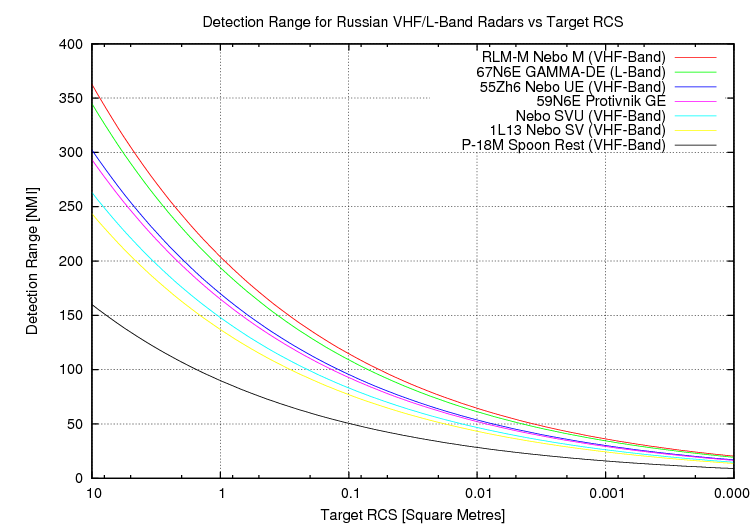
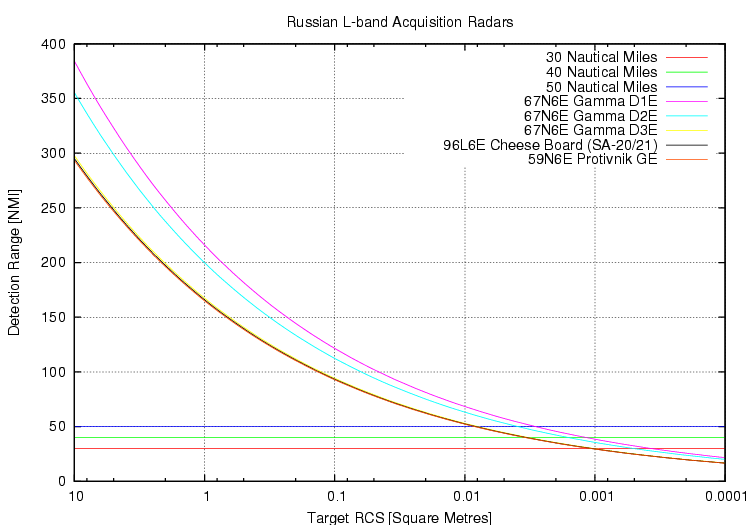
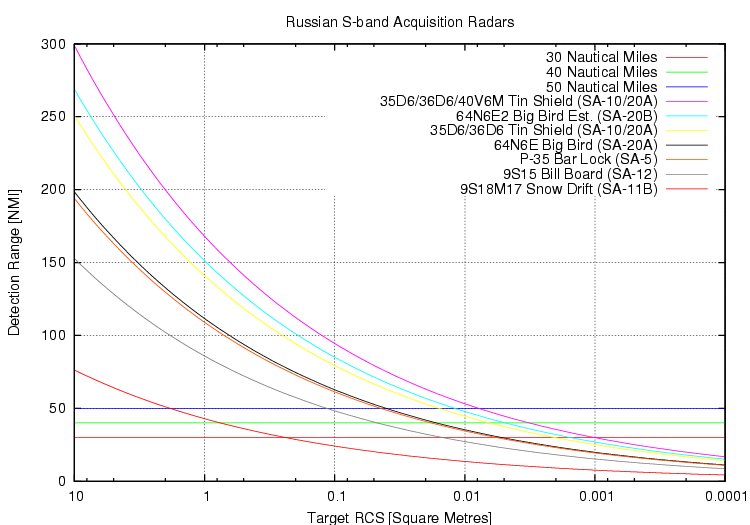
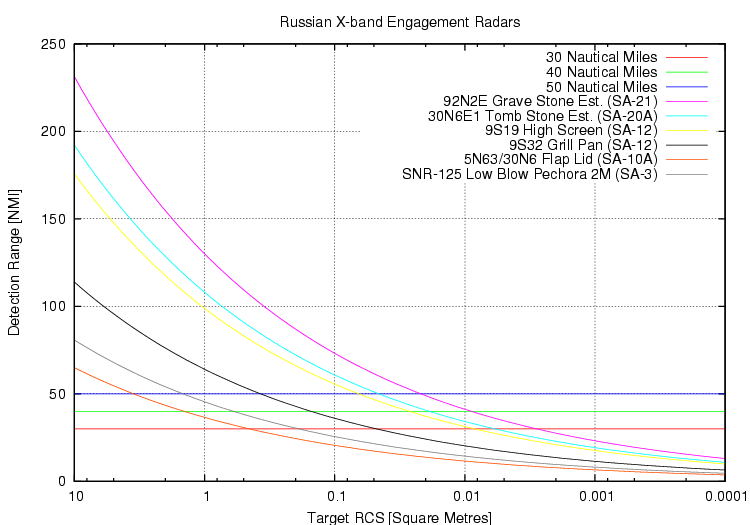
Estimări distanțe de detecție – distanță (sursa Air Power Australia)
Atât.
PS: Su-57 nu este un avion de generația a cincea. F-35 și F-22 sunt avioane de generația a cincea.
Iulian

 (medie: 5,00 din 5)
(medie: 5,00 din 5)Surse:
1. K. A. Norton, A. C. Omberg – The Maximum Range of a Radar Set, Proc. IRE Vol. 35 No. 1, ianuarie 1947
2. Louis N. Ridenour – Radar System Engineering, McGraw-Hill, 1947, ASIN: B00005XRP9
3. Lamont V. Blake – Radar Range-Performance Analysis, Artech House, 1980, ISBN-10: 0890062242, ISBN-13: 978-0890062241
4. Merril I. Skolnik (editor) – Radar Handbook (second edition), McGraw-Hill, 1990, ISBN: 0-07-057913-X
5. David K. Barton – Radar Equations for Modern Radar, Artech House, 2013, ISBN-13: 978-1-60807-521-8
6. Site RosOboronExport ( http://roe.ru )
7. 76N6 Clam Shell Low Altitude Acquisition Radar ( http://www.ausairpower.net/clamshell.html , accesat la 2019-03-02)
8. Russian / PLA Low Band Surveillance Radars ( http://www.ausairpower.net/APA-Rus-Low-Band-Radars.html , accesat la 2019-03-02)
9. NNIIRT 1L119 Nebo SVU / RLM-M Nebo M ( http://www.ausairpower.net/APA-Nebo-SVU-Analysis.html , accesat la 2019-03-02)
10. Search and Acquisition Radars (S-Band, X-band) ( http://www.ausairpower.net/APA-Acquisition-GCI.html , accesat la 2019-03-02)
11. Engagement and Fire Control Radars (S-band, X-Band, Ku/K/Ka-band) ( http://www.ausairpower.net/APA-Engagement-Fire-Control.html , accesat la 2019-03-02)
12. Radar Cross Section (RCS) ( https://www.globalsecurity.org/military/world/stealth-aircraft-rcs.htm , accesat la 2019-03-22)
13. China’s Multi-layer Anti-missile System with Copies of Russian Anti-missile radar ( https://tiananmenstremendousachievements.wordpress.com/tag/64n6e-big-bird-radar/ , accesat la 2019-03-06)
14. 30N6E “Flap Lid” ( http://www.radartutorial.eu/19.kartei/06.missile/karte005.en.html , accesat la 2019-03-01)
15. 30N6E Flap Lid B tracking and missile guidance radar for SA-10 Grumble ( https://www.armyrecognition.com/russia_russian_missile_system_vehicle_uk/30n6_30n6e_5n63s_flap_lid_b_tracking_and_missile_guidance_radar_sa-10_grumble_technical_data_sheet.html , accesat la 2019-03-01)
16. Nebo-SVU ( http://roe.ru/eng/catalog/air-defence-systems/radar-and-electro-optical-equipment-for-air-target-detection/nebo-svu/ , accesat la 2019-03-01)
17. Gamma-DE ( http://roe.ru/eng/catalog/air-defence-systems/radar-and-electro-optical-equipment-for-air-target-detection/gamma-de/ , accesat la 2019-03-01)
18. Protivnik-GE ( http://roe.ru/eng/catalog/air-defence-systems/radar-and-electro-optical-equipment-for-air-target-detection/protivnik-ge/ , accesat la 2019-03-01)
19. 92N6E “Grave Stone” ( http://www.radartutorial.eu/19.kartei/06.missile/karte006.en.html , accesat la 2019-03-01)
20. 55Zh6UE Nebo-UE ( http://www.deagel.com/Sensor-Systems/55Zh6UE-Nebo-UE_a002731001.aspx , accesat la 2019-03-01)
21. 55Zh6U “NEBO-U” ( http://www.radartutorial.eu/19.kartei/02.surv/karte039.en.html , accesat la 2019-03-01)
Imagini: Air Power Australia, US Air Force, US Navy, DoD, Wikimapia, Wikipedia, Defence News India, RosOboronExport, Israel Defense, 3rd Wing, Time, Pinterest, AviationCV, AIN Online, East Pendulum, National Interest, Defence Talk, Reddit, Pinterest, Wired, The Aviationist, Defence Update India, The Daily Beast, Business Insider, Fighter Sweep, Fi Aeroweb, CNN, Medium, Airliners, The Drive.
„Atat”…
RIP server memory space.
🙂
pai mai scoateti din pozele cu avioane, ca nu-s toate necesare 🙂
RaDAR = radio detection and ranging
RCS-ul asta e dat frontal, fara arme acrosate si de multe ori fara unii piloni. Déjà prezenta pilonilor si apoi a armelor il fac sa explodeze, de unde necesitatea de magazii interne. Sa nu mai vorbim de RCS lateral sau dedesubt/deasupra…
Altii zic:
https://www.globalsecurity.org/military/world/stealth-aircraft-rcs.htm
Apropos, de vazut RCS la F16 A/B (mai mare decat la MIG-21) vs C/D si V :
https://www.globalsecurity.org/military/world/stealth-aircraft-rcs.htm
http://mil-embedded.com/guest-blogs/radar-cross-section-the-measure-of-stealth/
RCS mp dB
B-52 100
B-1(A/B) 10
F-15 25
Su-27 15
cabin cruiser 10 10
Su-MKI 4
Mig-21 3
F-16 5
F-16C 1.2
man 1 0
F-18 1
Rafale 1
B-2 0.75 ?
Typhoon 0.5
Tomahawk SLCM 0.5
B-2 0.1 ?
A-12/SR-71 0.01 (22 in2)
bird 0.01 -20
F-35 / JSF 0.005 -30
F-117 0.003
insect 0.001 -30
F-22 0.0001 -40
B-2 0.0001 -40
„In terms of radar signature, F-16 will have RCS of 1,2 m2 without missiles and 2,2 m2 with missiles. ”
https://defenseissues.net/2015/10/21/f-16-vs-f-35/
Mai degraba RIP browser memory. 🙂
Un articol inceput in urma pe 3 februarie, cu peste 100 de revizii…
Iuliane, peste 50 de ani de acum inainte, cand cineva se va intreba ce inseamna „in floarea varstei” si „devotament”, o sa le arat seriile astea.
Sunt gelos. WW, Grigore, tu…mai oameni buni, ce naiba mancati in ultima vreme?
Jos palaria!
100 de revizii si tot am omis sa pun si de la ce provine acronimul RaDAR si sa folosesc termenul in romana pentru RCS – SER (suprafata efectiva de reflexie). 🙁
Multumesc pentru articol, a presupus multa munca.
Totusi, ar fi trebuit insistat pe relatia dintre RCS si banda de lucru a radarului, in sensul ca RCS in banda metrica (detectie) poate fi de ~100 de ori mai mare decat in banda centimetrica (tintire).
Da, mai erau o multime de lucruri de spus – este un domeniu extrem de vast. Despre benzile de frecvente intr-un articol viitor.
https://ndupress.ndu.edu/portals/68/Documents/jfq/jfq-55.pdf
Pe la pagina 138
Rafale-D nu existà.
Poate de aceea l-ai pus cu o SER (sectiune echivalentà radar) de 2 m2, adicà mai degradat decât F-16, F-18, Eurofighter, cu toate cà este singurul din aceste patru avioane care a fost studiat încà de la conceptie pentru o reducere semnificativà a SER pasive.
Astia zic:
https://www.quora.com/Would-you-class-the-Dassault-Rafale-as-the-best-multirole-aircraft-on-the-market
„Rafale has rcs of 1.25m^2 for compariosn typhoon has rcs of 1m^2 and Su 35 has rcs of 2m^2 but when rafale uses its Spectra EW suite its rcs is said to become as low as 0.06m^2 for comparision rcs of F35 is o.o1m^2 and rcs of 0.06 is quite stealthier than official rcs of Russian Sukhoi T 50 ( 0.5 to 0.1m^2) a new system called DEDRIA which is under deveploment will reduce rcs of rafale even more.”
Asta e tare 🙂 „Electronic Jamming capabilities of Sukhoi 35 is so good that an F22 would have to shot multiple missile at sukhoi 35 and yet achieved nil kill and it is supermanuverable .”
Am remarcat ca pe quora sunt foarte activi multi indieni si pakistanezi mai ales cand apar subiecte de genul asta si de regula au preferinte exprimate clar (desi subiective) pentru tehnica ruseasca.
da, e adevarat 🙂
hai ca ti-am gasit Rafale-D 🙂

https://forum.keypublishing.com/forum/modern-military-aviation/147186-clean-rafale-gripen-rcs-is-5-m2-and-3-m2-not-05-03/page2
https://forum.keypublishing.com/filedata/fetch?id=3677381&d=1537381283
KNOW YOUR RAFALE : What Makes it Stealthy In „So Called Non Stealthy Design”
https://www.youtube.com/watch?v=hOYhlBqSM6I
„Novi Avion”-esque

Interesant info. noi de bagat la cap
Fain articol !
Înseamnă ca f23 avea 0,00000000000……1 .
Cea mai buna protectie antiradar , sa „invelesti” avionul cu plasma. Care e electromagnetic total absorbente.
Atit americanos cit si rusii au facut experimente.
Problemele colosale sint inca nerezolvate:
– greutatea si complexitatea unui generator (generatoare la 360 grade ) de plasma aerotransportat.
– in cazul ” invelirii” avionului cu plasma , respectivul e orb si mut. Radarul din bot nu ” vede”si oricare legatura radio e moarta. Ca plasma absoarbe atit undele radio care lovesc avionul ( radare inamice) dar si oricate unda emisa de avion. ( propriul radar si comunicatile radio).
Poate peste 20- 25 de ani apare si primul avion ” invizibil” cu protectie plasma.
Cunosc ceva in plus, inteleg ceva mai bine (abia astept acum sa citesc articole despre avioane) si tocmai am intrat un pic intr-un domeniu strain mie, pe care fara locul asta (si oamenii de aici – nu doar Iulian) nu l-as fi explorat sau cunoscut.
Ma simt bine.
Multumim Iulian!
PS: Folosesc mereu Opera; arar si I.E. sau Edge. Pe Opera toate articolele functioneaza perfect.
PPS: abia astept articolul cu benzile! Pana atunci, voi digera incet informatiile din articolul asta si probabil voi reveni cu alt rapsuns.
RCS-ul e ca fata morgana: ba e mic ba e mare.
In teorie depinde de nenumarati factori prinre care:
– unghiul de expunere (cel mai imporant pentru ca e cel mai greu de controlat in misiune)
– existenta acrosajelor,
-statea suprafetelor (uscare umede, murdare)
– lungimea de unda a radarului. In teorie avioanele cu structuri stealth ar fi „mai” vizibile la lungimi de unda metrice. In practica in Romanaia nu am experimentat (asa stiu eu).
Pe radar toata povestea se reduce la: exista sau nu plot si track.
Oricum daca vorbim de invizibilitate radar, se zvoneste ca intitdeauna americanii au folosit-o inpreuna cu metode active de bruiaj, astfel incat semnalul util sa se piarda in zgomotul bruiajului. Bruiajul are un lob principal pe directia emitatoarelor deci asta presupune sinconizare tactica intre avionul invizibil (sau un avion tactic obisnuit) si avioanele de razboi electronic.
Si mai e o chestie, din punctul de vedere al apararii antiaeriene. Nu este de ajuns sa detectei existenta unei tinte. Trebuie sa asiguri intregul lant de activitati: detectie, urmarire, insotire, dirijarea interceptorilor, confirmarea doborarii (ultima e facultativa). Si astea in conditiile amenintarii cu rachete anti-radar, care te fac sa te intrebi cand e cazul sa intrerupi emisia. Sau mai adesea daca e cazul sa o incepi.
Asta e unul dintre motivele pentru care, in epoca radarului si a avioanelor cu RCS redus, majoritatea loviturilor se dau cu avioane obisnuite si rachete de croaziera/ arme stand off. Planificarea misiunilor se face tinand cont de capabilitatile si pozitionarea mijloacelor radar si AA ale adversarilor.
Imi este un pic neclara utilizarea gamei de radare.
Intelegerea mea este ca rusii folosesc totusi mai multe radare per system (in sensul de mai multe tipuri de radare/system) fata de occidentali.
Este intelegerea corecta? Si daca da, de ce? Unele dintre radare sunt optionale in sistem (daca luam s400 spre exemplu) ?
Lungimea de unda mai mare ajuta in detectia tintelor cu rcs mic? Realizez ca in formula e numerator si influenteaza direct proportional Rdet dar influenteaza si Pmin? Pmin este caracteristica importanta pentru rcs mic? Daca Pmin este „bun”, cum discrimineaza semnatura stealth de zgomot? Specific cel mai putin inteleg 59N6, care pare a fi in mijlocul spectrului (apropos: in unele locuri l-am vazut dat UHF), dar pare a fi dedicat pentru rcs mic, ceea ce ar infirma prima propozite de mai sus. Inteleg cumulul de factori descris in formula si ca de aici decurge si implicatia ca acelasi effect dorit poate fi realizat modificand un parametru sau poate altul, dar incerc sa inteleg mai exact la ce formule uzuale s-a ajuns in practica.
Pe mine m-ar ajuta sa inteleg mai bine procesul daca as avea si cateva cuvinte despre diferentele intre urmarire/ghidare si supraveghere/detecie; de ce e nevoie de platforme dedicate (sau multirol?), care e specificul fiecaruia si ce caracteristici reclama.
Next: din panza de paianjen F35 putem deduce ca un radar aerian/mobil are avantaje mari fata de unul de la sol in fata avioanelor cu RCS mic? Ma gandesc ca miscarea radarului il face sa varieze refllectia (iluminand tinta din unghiuri diferite) si astfel sa evidentieze tinta fata de fundal, si sa o identifice.
PS: paragraful #5: „Spectrul electromagnetic este împărțit în diverse” cred ca are nevoie de completare.
In Vest o baterie = un radar, care radar face si descoperirea tintei si iluminarea sa (ghidarea rachetei catre tinta). Rusii au mai multe radare dar care in esenta fac exact acelasi lucru.
Una dintre problemele rusilor consta in faptul ca radarele lor nu pot ilumina un numar suficient de trinte (nu pot conduce un numar mare de rachete in acelasi timp catre tinte diferite). Un bun exemplu sunt navele de lupta din era sovietica adevarati „pomi de Craciun”, multe radare pentru iluminare (conducerea focului).
Iar odata cu intrarea in serviciu a aparatelor de generatia a 5-a, ivanii au bagat toate radarele pe care le au in cadrul bateriei (lungimi de unda diferita) doar, doar vor prinde ceva. De aici putem deduce ca rusii au inca mari probleme cu puterea de calcul si deci…radare multe in loc de unul singur cu mare putere de procesare a semnalului.
Poate s-au gândit și la redundanta, în caz că un radar cade e scos din funcțiune sa aibă backup pt baterie. Apropo, dacă în Vest o baterie depinde de un singur radar și ăla pica asta înseamnă că bateria devine nefuncțională nu mai poate sa angajeze ținte ? Sau lucrul în rețea e gândit că redundanta și automat preia alt radar din rețea și acea baterie sub acoperirea lui?
Multumesc! Am probleme in a gasi un tipar in logica evolutiei radarelor rusesti de la o generatie la alta (desi sunt convins ca e una). Cat despre eficacitatea lor sau succesul avut, cred ca un bun turnesol sunt chinezii;respectiv in ce directie se duc ei cu radarele proprii si daca raman similare solutiilor rusesti sau pleaca pe alta directie.
Initial sistemul antiaerian S-300 a folosit radare cu frecventa de peste 2 GHz:
– radarul de ghidare a rachetelor si urmarire a tintelor – peste 7 GHz
– radarul de detectie pentru altitudine joasa – 2-4 GHz
– radarul de detectie pentru altitudine normala – 2-7 GHz
Intrarea in joc a F-117, B-2, F-22 a facut ca avioanele detectabile la 300-350 km (F-15), 175-225 km (F-16, F-18) sa fie observate la 40 km (F-35) sau 20 km (F-22). Deci a schimbat jocul
URSSRusiei.Apoi au fost adaugate radare care sa foloseasca frecvente mai joase (benzile VHF si UHF) in principal deoarece avioanele mentionate mai sus au fost optimizate pentru frecvente inalte. Adica daca proiectantii avioanelor au umblat la RCS (scazindu-l pentru benzile X si C), proiectantii radarelor aveau doua solutii: cresterea puterii pentru benzile X si C sau scaderea frecventei cu pastrarea puterii sau scaderea frecventei cu cresterea puterii.
Sistemele S-400 au fost dezvoltate pentru a putea conecta la sistemul de comanda si monitorizare orice modele de radare viitoare, in functie de dezvoltarea tehnologiei si nevoi. Despre radarele de supraveghere/detectie si cele de angajare, asa cum le spune numele, primele sint utilizate pentru a descoperi posibilele tinte si pentru urmarirea lor in timp ce cele de angajare au rolul de a actiona strict in zona de actiune a sistemelor antiaeriene (rachete/tunuri).
Un radar aerian este in dezavantaj fata de unul terestru deoarece avioanele – avind un spatiu limitat la dispozitie – nu pot utiliza radare cu frecvente prea joase sau puteri prea mari. In functie de directia din care ajunge radiatia incidenta la un F-35 se poate vedea ca a fost optimizat pentru a reflecta cit mai putina radiatie spre emitator in zona frontala. Ceea ce spuneai se referea la radare bistatice, deoarece un radar nu se va putea misca in jurul unui avion. 🙂
Am corectat greseala din articol.
Multumesc!
Acum inteleg mai bine ! Astept cu mai mare nerabdare partea cu benzile.
Referitor la F35, ma legam de variatia in scurt din grafic. Un exemplu este cel al varfurilor din zona ~35° & ~325°, unde pe un arc mai mic de 5 grade RCS variaza de la simplu la dublu. Acest arc e usor de parcurs daca ambele (sursa si tinta) sunt in miscare, pe cand la un radar fix el ar putea fi pastrat in arcul frontal. Plecand de la acest caz, ideea era daca nu cmva un radar care-si schimba pozitia are un avantaj:
– pentru ca variaza brusc energia receptionata de la sursa si astfel o identifica ca anormala/nenaturala (o distinge de zgomot sau ecouri naturale);
– pentru ca unghiul/directia dinspre care sunt receptionate undele de catre tinta nu este una aleasa de avion pentru a-i fi favorabila (si este greu predictibila).
„ideea era daca nu cmva un radar care-si schimba pozitia are un avantaj”
Cred ca mai bun era sistemul radar cu antene distribuite – „Multistatic Radars ”
https://en.wikipedia.org/wiki/Multistatic_radar
https://www.ese.wustl.edu/~nehorai/paper/Asilomar_Gogineni_2009.pdf
https://en.wikipedia.org/wiki/Duga_radar
apoi sunt si cele pasive, in domeniul FM/GSM
https://www.researchgate.net/publication/259503614_Low_Observable_Principles_Stealth_Aircraft_and_Anti-Stealth_Technologies
https://en.wikipedia.org/wiki/Over-the-horizon_radar
„The French developed an OTH radar called NOSTRADAMUS during the 1990s[17] (NOSTRADAMUS stands for New Transhorizon Decametric System Applying Studio Methods (French: nouveau système transhorizon décamétrique appliquant les méthodes utilisées en studio).) In March 1999, the OTH radar NOSTRADAMUS was said to have detected two Northrop B2 Spirit flying to Kosovo. It entered service for the French army in 2005, and is still in development. It is based on a star-shaped antenna field, used for emission and reception (monostatic), and can detect aircraft at a range of more than 2,000 kilometers, in a 360 degree arc. The frequency range used is from 6 to 30 MHz”
Stradivarius:
https://en.polemermediterranee.com/DAS-Projets/Maritime-Safety-and-Security/Surveillance-and-maritime-intervention/STRADIVARIUS
tot despre Nostradamus:
https://defence.pk/pdf/threads/nostradamus-oth-radar-for-stealth-detection.437013/
„The Nostradamus OTHR, operates in the HF band (3-30 MHz), is developed by the French ORENA aerospace research establishment and is located close to Dreux, approximately 100 km west of Paris. It consists of 288 emitting and receiving antennas and the antennas are placed in a star pattern with three equally spaced arms. Based on a star shaped antenna, the Nostradamus OTHR has a detecting range between 800 and 3,000km. A supercomputer, shown in Figure 22, can coordinate all antennas and the signal can be steered over 360° coverage.
Figure 23 illustrates the underground network construction of the Nostradamus OTHR system that uses a database management system.
The radar is capable of isolating and tracking multiple targets simultaneously in the area.
The French military applied the Nostradamus OTHR in the detection of stealth aircraft and other low observable targets such as cruise missiles with low radar and infrared signature.
The Nostradamus OTHR system is relatively inexpensive since it uses commercial off-the-shelf components.
The Nostradamus OTHR is the first OTHR system built in France and has at least two distinct advantages. First, it is monostatic and the signal is transmitted and received at the same location. In addition, the star-shaped antenna structure, 360° coverage, and a precise tuning of the elevation of the radar beam
provides omnibearing surveillance by collecting the target’s ground coordinates including ground range, ground range rate, azimuth angle, and elevation angle.”
Multumesc Marius!
Despre OHT mai citisem. Intamplarea face sa fi vazut poza cu Duga recent intr-o revista de la noi. Nu stiam insa despre Multistatic radar.
Marius (Zgureanu) anticipeaza articolul urmator. 🙂
oh shit, scuze 🙂